Introduction to Hamilton-Jacobi-Bellman equations

Preface
这是一篇令人感到肝疼的文章,在ddl边缘疯狂徘徊的我通宵了两天肝出来的final project. 原paper是英文写的,简单翻译一下放到blog上,姑且算是最优控制论和HJB方程的入门.
感谢石老师提供的这个topic, 不然我当时就肝不完final project了. 然而我还是没学明白PDE,一学期下来就会个数值解hhh (丢人
Abstract
最优控制问题通常可以和非线性PDE——Hamilton-Jacobi-Bellman equations——联系起来. 在这种情况下我们可以关注HJB方程的解,这通常拥有很好的性质,而不是原来的问题. 在这片论文中,我们介绍了基本的最优控制论以及HJB方程的推导. 我们也证明了HJB方程的一些基本的性质. 一个高效的用于求解HJB方程的数值方法也在论文中被介绍. 最后,我们用HJB方程和其数值解解决了一个简单的现实中的最优控制问题.
Introduction of optimal control
最优控制论是微分方程的一个延申. 它主要讨论解决动力系统的方法,通常具有如下形式:
$$
\left\{
\begin{split}
& \dot{u}(t)=f(u(t),\alpha(t))\quad 0\leq t\leq T \\
& u(0)=u_0
\end{split}
\right.
$$
其中 $\alpha$ 成为一个"control". 现在我们能定义一个(需要被最小化的)cost functional
\[ J(\alpha)=\int_t^T l(u,\alpha)dt+g(u(T)) \]
其中 \(\lambda>0\) 为 discount factor. 因此,求解一个最优控制问题等价于求解一个最优问题:
\[ v(u,t)=\inf_{\alpha} J(\alpha) \]
我们称 \(v\) 为 value function. 在众多求出value function的方法中,其中一个是求解Hamilton-Jacobi-Bellman (HJB) 方程:
\[ \frac{\partial v(u,t)}{\partial t}+\max_{\alpha} \{ f(u,\alpha)\cdot Dv(u,t)+l(u,\alpha) \}=0 \]
伴随着terminal condition:
\[ v(u,T)=g(u(T)) \]
由于最优控制问题可以与这样的非线性PDE联系起来,我们可以关注HJB方程的解,而不是原始的ODE问题.
Basic property of HJB equation
首要的也是最重要的问题是“方程的解是不是的确是我们所需要的”. 如果我们假设value function是足够光滑的,我们可以宣称value function是HJB方程的一个解 [1].
Theorem: If \(v\in C^1\), then \(v\) 是HJB方程(伴随着terminal condition)的一个解.
Proof:
为了简化问题,我们用 $v(x,t)$ 代替 $v(u,t)$. 对于给定的 $h>0$, 选择一个常数control
$$ \alpha(s)=a $$
其中 $t\leq s\leq t+h$. 则从 $t$ 到 $t+h$ 的cost为:
$$ \int_t^{t+h} l(x,a)ds+v(x(t+h),t+h) $$
由于 $v(x,t)$ 是下确界, 我们有
$$
\begin{split}
& v(x,t)\leq \int_t^{t+h} l(x,a)ds+v(x(t+h),t+h) \\
\Rightarrow & \frac{v(x(t+h),t+h)-v(x,t)}{h}+\frac{1}{h}\int_t^{t+h}l(x,a)ds \geq 0 \\
\Rightarrow & v_t(x,t)+Dv(x,t)\cdot \dot{x}(t)+l(x,a)\geq 0\quad as\ h\to 0 \\
\Rightarrow & v_t(x,t)+Dv(x,t)\cdot f(x,a)+l(x,a)\geq 0
\end{split}
$$
由于不等式对任意control $a$ 成立,我们有
$$ \min_{a}{ v_t(x,t)+ f(x,a)\cdot Dv(x,t)+l(x,a) }\geq 0 $$
现在假设 $a^*$ 是对于上面的min的最优 control, i.e.
$$
\begin{split}
\min_{a}\{ v_t(x,t)+ & f(x,a)\cdot Dv(x,t)+l(x,a) \} \\
& = v_t(x,t)+ f(x,a^*)\cdot Dv(x,t)+l(x,a^*)
\end{split}
$$
则我们有
$$
\begin{split}
& \int_t^{t+h} l(x,a^*)ds +v(x(t+h),a^*(t+h))=v(x,t) \\
\Rightarrow & \frac{v(x(t+h),t+h)-v(x,t)}{h}+\frac{1}{h}\int_t^{t+h} l(x,a^*)ds =0 \\
\Rightarrow & v_t(x,t)+Dv(x,t)\cdot \dot{x}(t)+l(x,a^*)= 0\quad as\ h\to 0 \\
\Rightarrow & v_t(x,t)+Dv(x,t)\cdot f(x,a*)+l(x,a*)= 0
\end{split}
$$
因此,value function是一个HJB方程的解.
□
然而,$C^1$ 条件过于强了. 在大部分情况下,HJB方程没有传统解,这意味着我们需要讨论弱解的存在性和唯一性. 有很多的工作表明由随机最优控制问题导出的HJB方程拥有唯一的velocity solution [2][3]. 重申原始的最优控制问题
$$ \left\{
\begin{aligned}
& \dot{x}(t)=f(x(t),\alpha(t))\quad 0\leq t\leq T \\
& x(0)=x_0
\end{aligned}
\right.
$$
我们将展示对应的HJB方程的弱解是唯一的.
Definition: HJB方程的弱解是一个函数 $v\in H^1$ s.t.
- 对任意非负 $\varphi\in C_c^\infty$, 不等式对任意$\alpha$成立:
$$
\begin{aligned}
& \int_t^T (v(x,s),\partial_s \varphi(x,s))ds+(v(x,t),\varphi(x,t)) \\
& \leq (g(x),\varphi(x,T))+\int_t^T (l(x,s,\alpha),\varphi(x,s))ds \\
& +\int_t^T (v(x,s)\cdot Df(x,s),\varphi(x,s))ds
\end{aligned}
$$
- 对任意非负 $\varphi\in C_c^\infty$ 以及任意给定的 $\varepsilon>0$, 存在 $\alpha'$ s.t.
$$
\begin{aligned}
& \int_t^T (v(x,s),\partial_s \varphi(x,s))ds+(v(x,t),\varphi(x,t))-\varepsilon \\
& \geq (g(x),\varphi(x,T))+\int_t^T (l(x,s,\alpha'),\varphi(x,s))ds \\
& +\int_t^T (v(x,s)\cdot Df(x,s),\varphi(x,s))ds
\end{aligned}
$$
Theorem: HJB方程的弱解是唯一的
Proof:
设 $v_1,v_2\in H^1$ 为弱解. 由[5]中的Lemma 4.5, 我们有
$$
\begin{aligned}
\int_t^T (v_2(x,s), & \partial_s \varphi(x,s))ds \\
& =\int_s^T (v_2(x,s)\cdot Df(x,s),\varphi(x,s))ds
\end{aligned}
$$
因此, $v_2$ 满足:
$$
\begin{aligned}
& (v_2(x,t),\varphi(x,t)) \\
& \leq (g(x),\varphi(x,T))+\int_t^T (l(x,s,\alpha),\varphi(x,s))ds \\
\end{aligned}
$$
以及对于 $\forall \varepsilon>0$, 存在 $\alpha'$ s.t.
$$
\begin{aligned}
& (v_2(x,t),\varphi(x,t))-\varepsilon \\
& \geq (g(x),\varphi(x,T))+\int_t^T (l(x,s,\alpha'),\varphi(x,s))ds \\
\end{aligned}
$$
由于 $\phi$ 是任意的,我们有
$$ v_2(x,t)\leq g(x)+\int_t^T l(x,s,\alpha) ds $$
以及
$$ v_2(x,t)-\varepsilon\geq g(x)+\int_t^T l(x,s,\alpha') ds $$
结合以上两个不等式,我们最终得到
$$ v_2(x,t)=\sup_{\alpha} { \int_t^T l(x,s,\alpha)ds+g(x) }=\sup_{\alpha} J(\alpha) $$
由于上确界是唯一的, 则 $v_1=v_2$, i.e. HJB方程的弱解是唯一的.
Numerical method to solve HJB equation
最优控制问题和其对应的HJB方程通常与现实问题相联系. 在这种情况下,我们可能会想知道解看上去怎么样. 适用于一般的PDE的数值方法,例如finite difference method 和 discountinuous Galerkin method,可能无法用于HJB方程. 因此,建立特别的算法,同时保证效率和精确度,是重要的. 其中一种方法是Hierarchical Dirichlet process (HDP) algorithm [4].
我们首先离散化时间,并将最优控制问题重写为如下形式:
$$ x_{k+1}=f(x_k)+g(x_k)u(x_k) $$
伴随着 cost function
$$
\begin{aligned}
V(x_k) & =\sum_{n=k}^\infty Q(x_n)+u^T(x_n)Ru(x_n) \\
& =x_k^T Q x_k +u_k^TRu_k+V(x_{k+1})
\end{aligned}
$$
则, HJB 方程变为
$$ V(x_k)=\min_{u_k}(x_k^T Qx_k+u_k^T Ru_k+V(x_{k+1})) $$
我们用一个初始值$V_0(x)$ (通常 $=0$)开始HDP算法,然后我们可以通过求解以下方程得到$u_i,V_i$
$$
\begin{aligned}
u_i(x_k) & =\arg\min_{u}(x_kTQx_k+uTRu+V_i(x_{k+1})) \\
& = \arg\min_{u}(x_kTQx_k+uTRu+V_i(f(x_k)+g(x_k)u)) \\
& = \frac{1}{2}R{-1}g(x_k)T \frac{\partial V_i(x_{k+1})}{\partial x_{k+1}}
\end{aligned}
$$
以及
$$
\begin{aligned}
V_{i+1}(x_k) & =\min_{u}(x_kTQx_k+uTRu+V_i(x_{k+1})) \\
& =x_kTQx_k+u_iT(x_k)Ru_i(x_k) \\
& \quad +V_i(f(x_k)+g(x_k)u_i(x_k))
\end{aligned}
$$
对于 $i\geq 0$.
我们将展示通过HDP算法得到的$\{V_i\}$ 收敛至HJB方程的解.
Lemma 3.1: 设 $\mu_i$ 为任意一列 controls, 并定义 $\Lambda_i$
$$ \Lambda_{i+1}(x_k)=Q(x_k)+\mu_i^T R\mu_i +\Lambda_i (x_{k+1}) $$
If $V_0(x_k)=\Lambda(x_k)=0$, then $V_i(x_k)\leq \Lambda_i(x_k)$ 对于 $i\geq 0$.
Lemma 3.2: 若原始的最优控制问题是controllable的, 则
- 存在一个上界 $Y(x_k)$ 对于 $V_i(x_k)$
- 若HJB方程可解, 则上界可达到上确界, 记为 $V^*(x_k)$, 为HJB方程的解.
Theorem: If $V_0(x_k)=0$, then $\{V_i\}$ 是单调不减的,并且收敛至 $V^*$.
Proof:
设 $\mu_i(x_k)=u_{i+1}(x_k)$ 并定义 $\Lambda_i$
$$ \Lambda_{i+1}(x_k)=Q(x_k)+u_{i+1}^TRu_{i+1}+\Lambda_i(x_{k+1}) $$
由Lemma 3.1, 我们有 $V_i(x_k)\leq \Lambda_i(x_k)$ 对任意的 $i\geq 0$. 我们将通过归纳法证明 $V_{i+1}(x_k)\geq \Lambda_i(x_k)$.
对于 $i=1$, 我们有
$$ V_1(x_k)-\Lambda_0(x_k)=Q(x_k)\geq 0 $$
i.e. $V_1(x_k)\geq \Lambda_0(x_k)$. 对于 $i\geq 1$, 假设$V_i(x_k)\geq \Lambda_{i-1}(x_k)$ 成立, 则我们有
$$ V_{i+1}(x_k)-\Lambda_i(x_k)=V_i(x_{k+1})-\Lambda_{i-1}(x_{k+1})\geq 0 $$
这意味着 $V_{i+1}(x_k)\geq \Lambda_i(x_k)$. 因此, $V_{i}(x_k)$ 是单调不减的.
由Lemma 3.2 我们可知 $\{V_i(x_k)\}$ 有界. 因为它也是单调不减的, 则存在一个极限 $V_{\infty}$ 且
$$ \lim_{i\to\infty}V_i=V_{\infty} $$
因为 $V^*$ 是上确界, 我们有
$$ V_{\infty}\leq V^* $$
我们只需说明$V_{\infty}\geq V^*$. 由$V_i$的构造我们可得
$$
\begin{aligned}
& \quad V_\infty(x_k)=x_kTQx_k+u_\inftyT(x_k)Ru_\infty(x_k)+V_\infty(x_{k+1}) \\
& \Rightarrow V_\infty(x_{k+1})- V_\infty(x_k)=-x_kTQx_k+u_\inftyT(x_k)Ru_\infty(x_k) \\
\end{aligned}
$$
因此, $V_\infty(x_k)=Y(x_k)$. 由于 $V^*(x_k)$ 是最小上界, $V_\infty(x_k) \geq V^*(x_k)$. 于是,
$$ V_\infty(x_k)=V*^(x_k) $$
这意味着 $V_i$ 收敛至HJB方程的解.
□
Application
考虑一个简单的问题:我们希望一个在$x=10$的速度为0的车移动至$x=0$的时候速度也为零,并用时最少. 加速度的范围为$[-1,1]$. 设$u(t)$为车的位置,$v(t)$为速度,$\alpha(t)$为加速度. 我们的目的是求解如下最优控制问题:
$$
\left\{
\begin{aligned}
& \dot{x}(t)=\begin{pmatrix}
0 & 1 \\
0 & 0
\end{pmatrix}
x(t)+\begin{pmatrix}
0 \\
1
\end{pmatrix}
\alpha(t) \\
& x(0)=\begin{pmatrix}
10 \\
0
\end{pmatrix}
\end{aligned}
\right.
$$
其中 $x(t)=(u(t),v(t))^T$. cost function 为
$$ J(\alpha)=T=\int_0^T 1dt $$
我们首先需要求出对应的HJB方程. 定义value function $V(u,v)$
$$ V(u,v)=\inf_{\alpha\in [-1,1]}J(\alpha)=\inf_{\alpha\in [-1,1]}T_\alpha $$
这意味着从$(0,0)$ 到 $(u,v)$所用的最少时间. 因为$V(u,v)$不依赖于$t$,则HJB方程变为:
$$ \min_{\alpha\in[-1,1]} \{ f\cdot DV +1 \}=0 $$
其中 $f=(v,\alpha)^T$. 利用HDP algorithm, 我们可以得到$V(u,v)$的数值解:
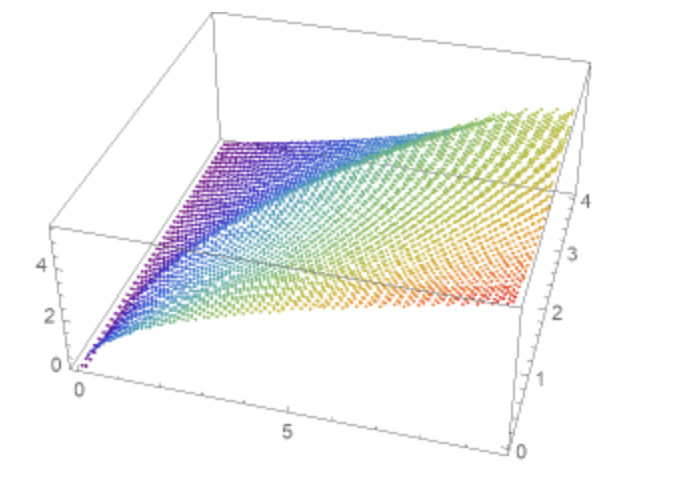
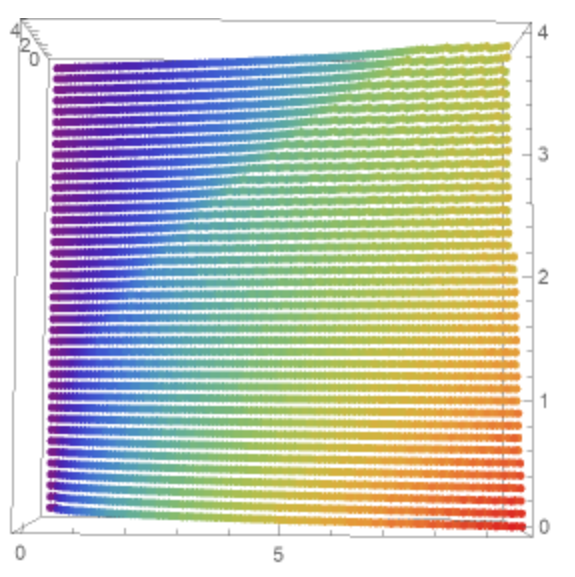
更进一步, 我们可以得到$u(t),v(t),\alpha(t)$的数值解:
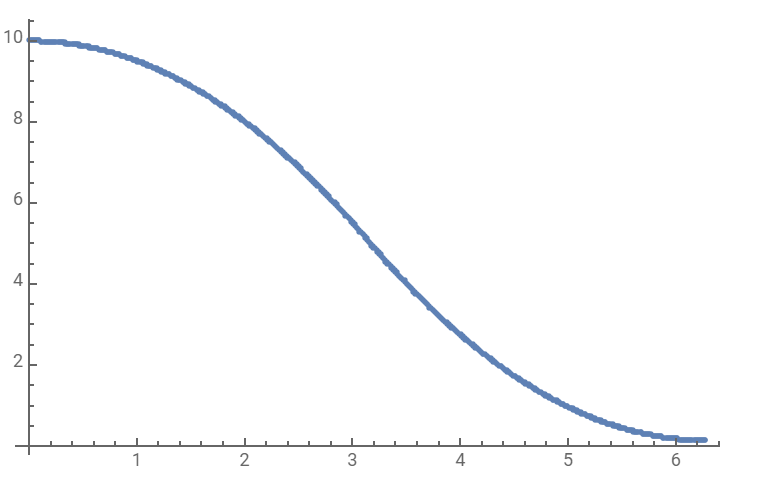
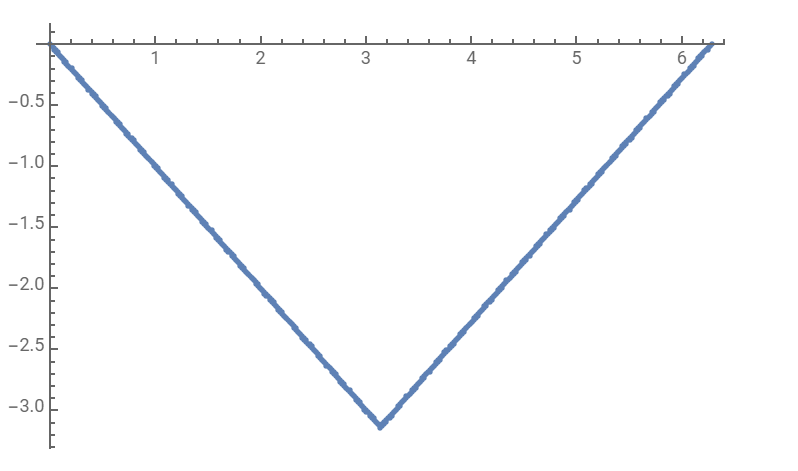
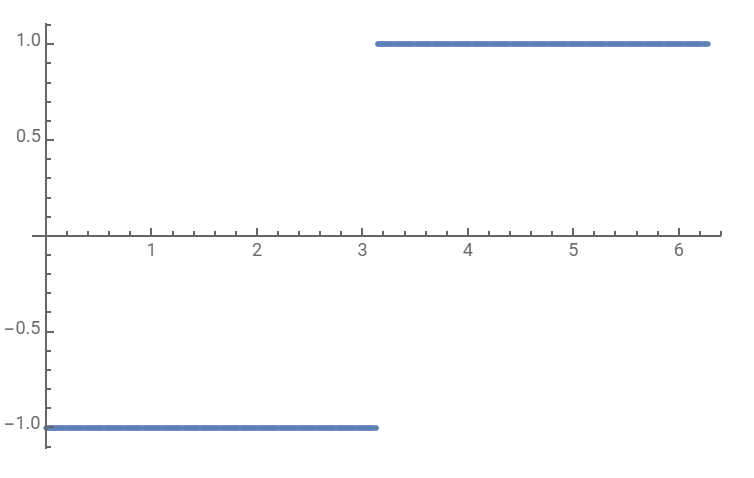
注意到加速度不是连续的. 在传统的微分方程数值解中,我们需要假设未知函数是连续的或者足够光滑的. 这个例子说明传统的数值方法可能不适用于最优控制问题. 因此,将原始问题转化为非线性HJB方程是一个有效的求解最优控制问题的方法.
Conclusion
我们已经展示了HJB方程的推导以及关于它的解的讨论. HJB方程在许多领域中有着重要的作用,例如物理或者经济. 求解最优控制问题仍然是研究的一个热点. 许多研究者正尝试将其于神经网络和深度学习相结合. 然而,维数灾难(curse of dimensionality)仍然是一个重要的问题. 尽管HDP算法在简单的小车问题中表现得十分良好,但当我们尝试解决高维问题时,计算所用的时间可能会超出可接受的范围. 一个可行的尝试为建立从高维到低维的映射,这通常会损失一定的精度. 另外的尝试是利用entropy method构造算法,这通常具有很好的收敛性质.
References
- Lawrence Craig Evans, An Introduction to Mathematical Optimal Control Theory.
- J. Yong, X. Y. Zhou, Stochastic Control, Hamilton Systems and HJB Equations, Appl. Math., 43, Springer-Verlag, New York, 1999.
- WEI, L., WU, Z. and ZHAO, H., 2014. Sobolev weak solutions of the Hamilton Jacobi Bellman equations. SIAM Journal on Control and Optimization, 52 (3), pp. 1499 - 1526
- Asma Al-Tamimi, Frank L. Lewis, and Murad Abu-Khalaf, Discrete-Time Nonlinear HJB Solution Using Approximate Dynamic Programming: Convergence Proof, IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 38, NO. 4, AUGUST 2008
- Y. Ouknine, I. Turpin, Weak solutions of semilinear PDEs in sobolev spaces and their probabilistic interpretation via the FBSDEs. Stochastic Analysis and Applications, 24 (2006), pp. 871-888.